
One of the things to come out of previous idea sharing was the new technique of using hand warmed toilet bowl wax (oh the indignity of it all! :) ) instead of melting it into a liquid, which saves time and equipment.
It will be great to see what folks have come up with this year!
Unfortunately for me, I (T.H. Culhane) will be unable attend this go-round as I have a previous commitment with the U.S. Embassy to teach the engineering of home and community scale biofuel reactors in Israel and Palestine March 11 through 16 , serving my country by helping build a foundation of resource security (energy, water and waste management) that can help dissolve tensions and provide stepping stones for a brighter common future (and this after spending February 25 through March 10 doing similar trainings in two remote parts of the Philippines.) But whether it is sharing ideas to improve the engineering of the Sea Perch or to use engineering education to improve health, hygiene, clean energy and the existential challenges of providing food and water, this kind of idea sharing is part and parcel of the same ethos: "Yes WE can -- we can make the world a better place and improve our educational systems if we all pull together and are generous with the fruits of our discoveries."
This is the core of the PORPOISE purpose!
David Grober of Motion Picture Marine will be attending the Sea Perch Stakeholder's meeting, and he will share some of the ideas we have been working with as we develop our program with Washington Preparatory High School in Los Angeles, CA, Venice High School in Venice, CA and WMST Public Charter School in Washington DC.
One of the is an innovation Motion Picture Marine's engineer, Brent Spencer, came up with for the Sea Hawk/Manta Ray robo-boat (which uses the same size motor as the Sea Perch (albeit with double the amperage for greater speed on the surface of the water) housed in the same wax filled film canisters, which the students at WMST delightedly decided could be applied to the Sea Perch too.
It involves making the Sea Perch motors easily removable and hence replaceable in competition when something goes wrong -- like the inevitable loss of a propeller! We can't tell you how many times we have seen the propellers, which are glued or epoxied to the thin motor shaft, suddenly spin off into the wild blue yonder. Or how many times we've watched one motor run slower than the other even though the code is the same and the voltage and current supplied are the same (this happened when we were demonstrating the Sea Hawk motors to the ONR at WMST last week!) -- every motor is different, try as we can for uniformity, and things like this can make or break a team's competitiveness!
So our idea was to make the motors "hot swappable", and, just as racing cars can pull into a pit stop and have their tires replaced and get right back into the race, the Sea Perch (and Sea Hawk) can be hauled out of the water, the defective motor pulled and a new one popped in and, 'voila', you are back in the game! And best of all, the motors no longer need to be mounted insecurely with zip ties -- they are plugged securely into T's.
 |
| Motion Picture Marine/Perfect Horizon Engineer Brent Spencer holds up a Sea Perch with the motors mounted on Ts for easy swappability. |
 |
| Brent says, "In a competitive event you want things to be easy to replace. When I'm out on a movie shoot with our Perfect Horizon Robotic Camera Stabilizer, and we are miles out to sea, if something goes wrong we can't do the trouble shooting on a boat that is pitching and rolling and bathed in salt spray. So we make our units with "hot swappable" parts that can be popped out and in. Similarly, our idea for the Sea Hawk and the Sea Perch was to make it so the motors can be pulled on and off in a jiffy, in any conditions! What works for the industry should also be part of the student's curricula!" |

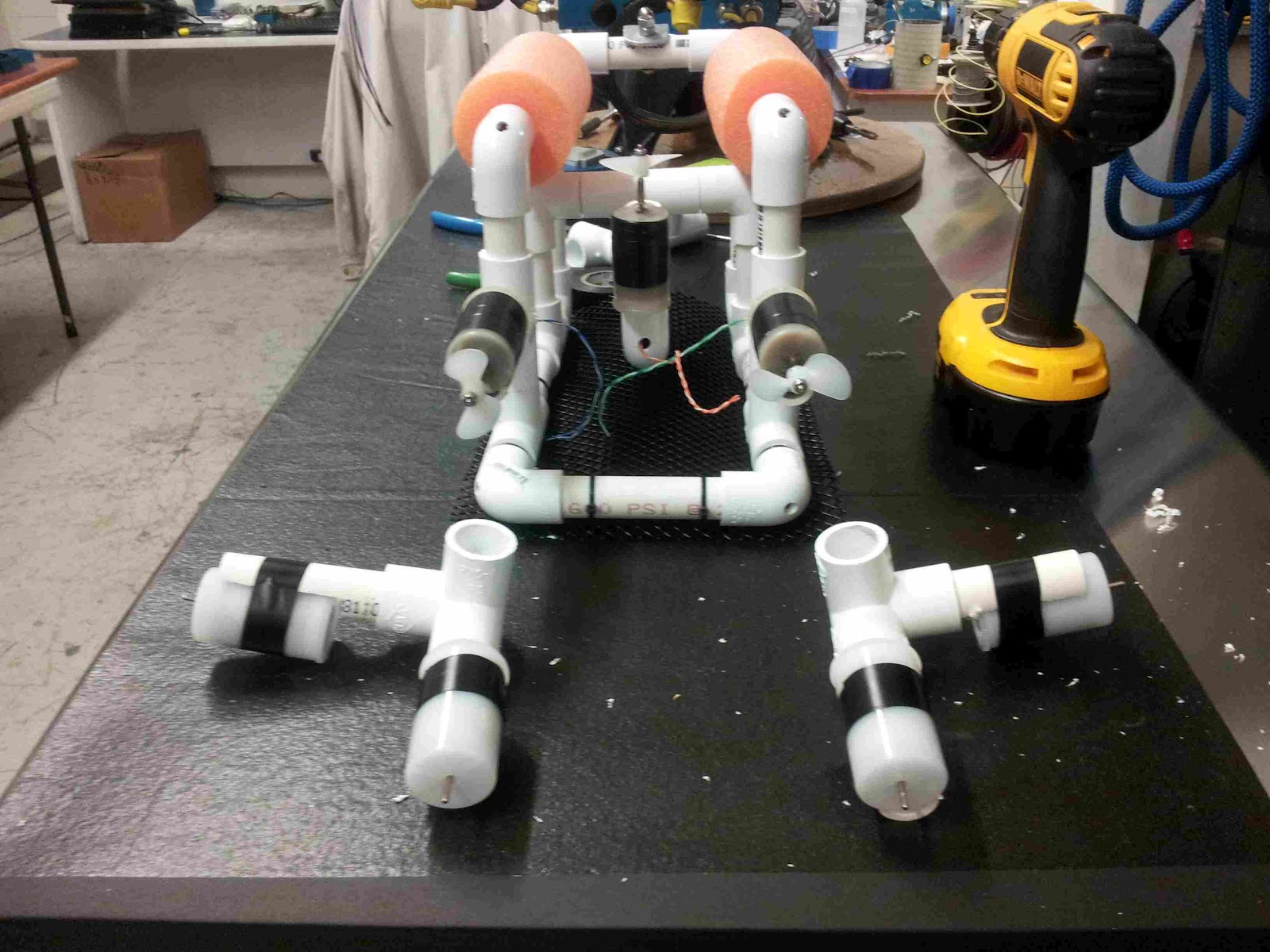
The motors are taped tightly to a 3 inch piece of PVC that has 2 inches half cut to provide a mount, and plugged into T's. You can also see another improvement we make to our Sea Perch's -- a camera mount on the bow for underwater video collection. After all, we are "Motion Picture Marine" and the Sea Perch is no toy. Properly pimped, it can be a great tool for real underwater photography, as an upcoming episode of Sci Girls, whose photographers we me with in DC last week, illustrates!


The pictures below show how we prepare the 3 inch (7.62 cm) 1/2" pvc pipes for motor mounting:


The idea for using this solution on the Sea Perch came from Brent Spencer's concept for creating such mounts for the Sea Hawk. Below we see the start of T.H. Culhane and EZ Money Harper's idea for making the Sea Hawk an amphibious vehicle; using a three way 90 degree piece TWO, count 'em, two motors can be put on the Sea Hawk boat -- rear thrusters with propellors for moving in the water, and side motors with wheels on them, for rolling around the classroom!
By giving the Sea Hawk amphibious capability, students can test their motor shield Arduino code in the classroom, working out how to best make use of the Ping Ultrasonic sensors and PIR and IR sensors and compass and GPS and bluetooth and Xbee shields without risking the boat in the water. They can drive the craft or let it move autonomously in the safety of a smooth dry land environment before taking it out to the tricky environment at sea. This also permits more schools to participate that don't have easy access to water. The hope is that everyone can get started in aquatic robotics. Eventually the craft can migrate to the water, and anyway, if we wait long enough, given sea level rise due to climate change, the water will come to us... so it doesn't hurt to get started.
Waterworld inevitable? Just ask Kevin Costner! We'll work on the "how to build your own gills" tutorial as soon as we've figured that one out!


 |
Here the Sea Perch is docked with the Sea Hawk. In this Sea Perch the motors are using their traditional zip tie mounts. But note that the Sea Hawk itself uses Sea Perch type motors mounted on the T junction with the 3 inch pvc pipe mount.  As you can see from the above pictures, the Sea Hawk itself, as a roboboat platform, is essentially a way pimped out Sea Perch. It evolved from the same endo-skeleton of 1/2" PVC and it uses the same motors waterproofed with wax inside plastic film canisters (though we use motors that appear identical in size and shape but that draw 1.2 Amp rather than 0.6). Once you have the motors in the canister you can add wheels or propellers as you see fit.
VENICE HIGH PIMPS THEIR PERCH
On February 23rd at the Robotics Club meeting at Venice High School the students started pimping their perches for use with their new Sea Hawks.

They started by removing the back pipes and cutting them into 2 inch sections and inserting a T in between.
 Dana Wieland shows the Perch with the T's ready for mounting the rear motors.   Next she prepares the Perch for the new mount for the up/down motors.  While Carlos works on the Arduino program for the robotic claws that will hold the Sea Perch to the Sea Hawk.  Next Dana mounts the RGB/IR camera on the Sea Perch for its underwater photography mission.    Having completed a Sea Hawk frame and having attached the Sea Hawk skin that Dana cut the previous week, Jonathan makes suggestions for how to make the Sea Perch mate with the Sea Hawk.  Carlos and Ian experiment with attachements on the Sea Perch that will enable the robotic claws on the Sea Hawk to grab it and hold it in place.   Ian determines that the Sea Hawk should have extra PVC endoskeletal support for the Robotic Claw Servos...    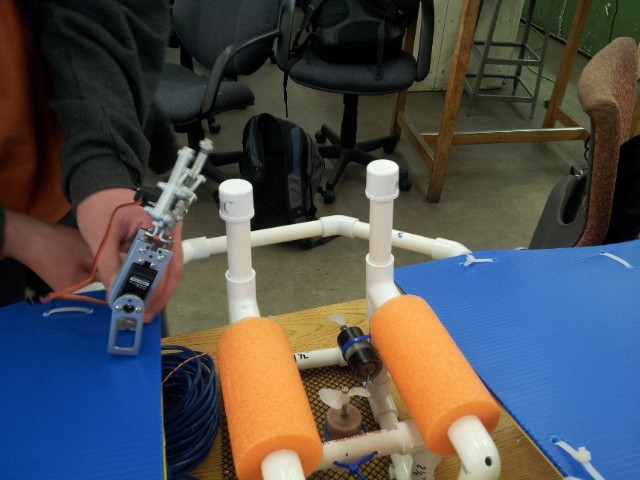 |
No comments:
Post a Comment