You'll have to check back here for the evolving (and never final!) results of "water-proofing" (or is that "water-proving"?) -- for right now we don't have much up here, but this is where we will post videos and descriptions of the sacred process of trial and error as we test things out in the liquid phase of that universal solvent that makes this planet unique in the solar system, H2O....
Testing the Sea Perch 0.7 amp Jameco motors mounted on the Sea Hawk.
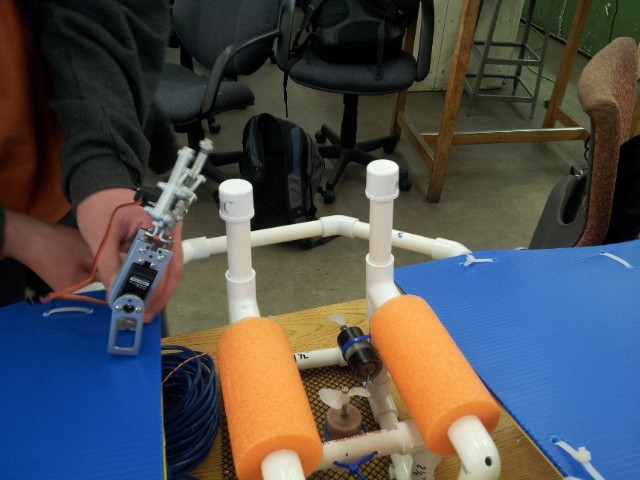
At Mother's Beach in Marina Del Rey in California EZ Money Harper, his dad Roy Harper and I tested how the Sea Hawk drives with Sea Perch motors (Jameco .7 Amp motors) running off of a 9.6 V NiCd rechargeable hobby battery. They drain the battery fairly quickly and the craft doesn't move all that fast, but it does work. One issue we found we needed to resolve is to make sure we get counter-rotating propellers. In this test we had propellers that turn in the same direction and of course this made the boat turn slightly to the right.
Here EZ Money describes the results of one of our motor tests. We had the motors set up so they would counter-rotate, but since we had the same propeller on both motors it merely turned the craft around in circles. We reversed polarity so both were pushing but this, of course, biased the craft to the right. Since then we have installed a counter-rotating propeller on the right motor and now it should go straight. This is a good learning experience!
Below are earlier tests of the craft, starting with a series of flotation tests.
First Float Test of Sea Hawk Surface Craft at Mother's Beach, part 1 of 5
First Float Test of Sea Hawk Surface Craft, part 2 of 5
First Float Test of Sea Hawk Surface Craft, part 3 of 5
First Float Test of Sea Hawk Surface Craft, part 4 of 5
First Float Test of Sea Hawk Surface Craft, part 5 of 5
The above video shows that, yes, you can test out your Sea Perch in your bathtub - you just can't dive very deep. The up and down thrusters can also make a bit of a... splash. As the Hitch-hiker's Guide to the Galaxy tells us, "don't panic... and always carry a towel."
The following two videos show the appropriate winter use of a condominium swimming pool is for testing your Sea Perch/Sea Hawk/Manta Ray. Wet suit optional.
The Annual Sea Perch Stakeholder's meeting will take place in Newport Rhode Island March 12 and 13, 2012. This is an opportunity to share ideas for hacking the sea perch (Daryl Davidson, president of the AUVSI called it "pimping your perch" -- has kind of a ring to it!) and improving its functionality.
One of the things to come out of previous idea sharing was the new technique of using hand warmed toilet bowl wax (oh the indignity of it all! :) ) instead of melting it into a liquid, which saves time and equipment.
It will be great to see what folks have come up with this year!
Unfortunately for me, I (T.H. Culhane) will be unable attend this go-round as I have a previous commitment with the U.S. Embassy to teach the engineering of home and community scale biofuel reactors in Israel and Palestine March 11 through 16 , serving my country by helping build a foundation of resource security (energy, water and waste management) that can help dissolve tensions and provide stepping stones for a brighter common future (and this after spending February 25 through March 10 doing similar trainings in two remote parts of the Philippines.) But whether it is sharing ideas to improve the engineering of the Sea Perch or to use engineering education to improve health, hygiene, clean energy and the existential challenges of providing food and water, this kind of idea sharing is part and parcel of the same ethos: "Yes WE can -- we can make the world a better place and improve our educational systems if we all pull together and are generous with the fruits of our discoveries."
This is the core of the PORPOISE purpose!
David Grober of Motion Picture Marine will be attending the Sea Perch Stakeholder's meeting, and he will share some of the ideas we have been working with as we develop our program with Washington Preparatory High School in Los Angeles, CA, Venice High School in Venice, CA and WMST Public Charter School in Washington DC.
One of the is an innovation Motion Picture Marine's engineer, Brent Spencer, came up with for the Sea Hawk/Manta Ray robo-boat (which uses the same size motor as the Sea Perch (albeit with double the amperage for greater speed on the surface of the water) housed in the same wax filled film canisters, which the students at WMST delightedly decided could be applied to the Sea Perch too.
It involves making the Sea Perch motors easily removable and hence replaceable in competition when something goes wrong -- like the inevitable loss of a propeller! We can't tell you how many times we have seen the propellers, which are glued or epoxied to the thin motor shaft, suddenly spin off into the wild blue yonder. Or how many times we've watched one motor run slower than the other even though the code is the same and the voltage and current supplied are the same (this happened when we were demonstrating the Sea Hawk motors to the ONR at WMST last week!) -- every motor is different, try as we can for uniformity, and things like this can make or break a team's competitiveness!
So our idea was to make the motors "hot swappable", and, just as racing cars can pull into a pit stop and have their tires replaced and get right back into the race, the Sea Perch (and Sea Hawk) can be hauled out of the water, the defective motor pulled and a new one popped in and, 'voila', you are back in the game! And best of all, the motors no longer need to be mounted insecurely with zip ties -- they are plugged securely into T's.
Motion Picture Marine/Perfect Horizon Engineer Brent Spencer holds up a Sea Perch with the motors mounted on Ts for easy swappability.
Brent says, "In a competitive event you want things to be easy to replace. When I'm out on a movie shoot with our Perfect Horizon Robotic Camera Stabilizer, and we are miles out to sea, if something goes wrong we can't do the trouble shooting on a boat that is pitching and rolling and bathed in salt spray. So we make our units with "hot swappable" parts that can be popped out and in. Similarly, our idea for the Sea Hawk and the Sea Perch was to make it so the motors can be pulled on and off in a jiffy, in any conditions! What works for the industry should also be part of the student's curricula!"
The motors are taped tightly to a 3 inch piece of PVC that has 2 inches half cut to provide a mount, and plugged into T's. You can also see another improvement we make to our Sea Perch's -- a camera mount on the bow for underwater video collection. After all, we are "Motion Picture Marine" and the Sea Perch is no toy. Properly pimped, it can be a great tool for real underwater photography, as an upcoming episode of Sci Girls, whose photographers we me with in DC last week, illustrates!
The pictures below show how we prepare the 3 inch (7.62 cm) 1/2" pvc pipes for motor mounting:
The idea for using this solution on the Sea Perch came from Brent Spencer's concept for creating such mounts for the Sea Hawk. Below we see the start of T.H. Culhane and EZ Money Harper's idea for making the Sea Hawk an amphibious vehicle; using a three way 90 degree piece TWO, count 'em, two motors can be put on the Sea Hawk boat -- rear thrusters with propellors for moving in the water, and side motors with wheels on them, for rolling around the classroom!
By giving the Sea Hawk amphibious capability, students can test their motor shield Arduino code in the classroom, working out how to best make use of the Ping Ultrasonic sensors and PIR and IR sensors and compass and GPS and bluetooth and Xbee shields without risking the boat in the water. They can drive the craft or let it move autonomously in the safety of a smooth dry land environment before taking it out to the tricky environment at sea. This also permits more schools to participate that don't have easy access to water. The hope is that everyone can get started in aquatic robotics. Eventually the craft can migrate to the water, and anyway, if we wait long enough, given sea level rise due to climate change, the water will come to us... so it doesn't hurt to get started.
Waterworld inevitable? Just ask Kevin Costner! We'll work on the "how to build your own gills" tutorial as soon as we've figured that one out!
Here the Sea Perch is docked with the Sea Hawk. In this Sea Perch the motors are using their traditional zip tie mounts. But note that the Sea Hawk itself uses Sea Perch type motors mounted on the T junction with the 3 inch pvc pipe mount.
As you can see from the above pictures, the Sea Hawk itself, as a roboboat platform, is essentially a way pimped out Sea Perch. It evolved from the same endo-skeleton of 1/2" PVC and it uses the same motors waterproofed with wax inside plastic film canisters (though we use motors that appear identical in size and shape but that draw 1.2 Amp rather than 0.6). Once you have the motors in the canister you can add wheels or propellers as you see fit.
VENICE HIGH PIMPS THEIR PERCH
On February 23rd at the Robotics Club meeting at Venice High School the students started pimping their perches for use with their new Sea Hawks.
They started by removing the back pipes and cutting them into 2 inch sections and inserting a T in between.
Dana Wieland shows the Perch with the T's ready for mounting the rear motors.
Next she prepares the Perch for the new mount for the up/down motors.
While Carlos works on the Arduino program for the robotic claws that will hold the Sea Perch to the Sea Hawk.
Next Dana mounts the RGB/IR camera on the Sea Perch for its underwater photography mission.
Having completed a Sea Hawk frame and having attached the Sea Hawk skin that Dana cut the previous week, Jonathan makes suggestions for how to make the Sea Perch mate with the Sea Hawk.
Carlos and Ian experiment with attachements on the Sea Perch that will enable the robotic claws on the Sea Hawk to grab it and hold it in place.
Ian determines that the Sea Hawk should have extra PVC endoskeletal support for the Robotic Claw Servos...
The PORPOISE project is interdisciplinary and as such invites all participants to use their artistic skills to make the field of aquatic engineering fun, exciting, engaging and easy to communicate.
On this page we will post some of the works in progress that our members are creating for the initiative:
These early animations by 9th grader Benjamin Standfield give an example of how a passion for 3D animation and game creation can enhance the program:
1. Sea Perch docking in the Sea Hawk; concept done in Blender:
2. Assembly of the Sea Perch, concept, done in Blender.
And here is the original PORPOISE concept art by T.H. Culhane, using the yin-yang symbol as the basis for the programs symbology:
Dwayne, a student at WMST Public Charter School in Washington DC, came up with this variant on the theme, arguing that to be true to the ethos of our program, both halves of the yin-yang should be utilized in the logo. In his concept art, one half represents the fish, a symbol of our common origins and the underwater aspect of our program, and the other is the cetacean (the porpoise) which evolved from the fish (the Sea Perch?) and now amphibiously inhabits two worlds, but remains connected to the fish from which it was birthed. Note also that Dwayne used the yin yang form for the eyes as well, lending the creatures more personality. This is an example of how the program itself is an evolutionary creature, drawing strength and inspiration from you, its members!
Below, Dwayne begins to sketch out the Sea Perch for 2D animation and tutorials:
More to come! Please feel free to share your own artwork and idea!
For this tutorial we are using Blender 2.58
The tutorial describes how to create the Sea Hawk in virtual reality but the dimensions and procedure are similar for making the craft in the real world.
If you want to see photos of builds at our three partner schools, scroll all the way down!
Using Blender:
In the Scene Panel set Units to Metric (we will use Metric throughout
this program and try to avoid the kind of conversion problems that led
to a Mars probe completely missing the red planet!). Click on the
"Separate" toggle. A good tutorial for this setup is here: http://www.katsbits.com/tutorials/blender/metric-imperial-units.php#gridspacing
Start by changing your grid size to 1000 lines at a scale of .005 by going to View>Properties (or use the N key to call up the Properties panel) and underneath "Grid Floor" set Lines:1000, Scale .005. In this way we create a 5 meter by 5 meter grid in which each of the smallest squares in the grid is .5 cm (half a cm) which should be sufficient for our purposes.
Add a plane (Shift-A, add plane) and make its dimensions (using the Dimensions tab in the Properties window (N) X:1m and Y:1m and Z:0m. This represents the basic sheet of plastic one might use (we will add the Z dimension later).
Now move the plane into the top right quadrant by hitting "g" (for grab) then "x" (to lock in the x direction) and then ".5" (to move the cube 50 cm to the right) and hit enter. Then hit "g" again, then "y" (for locking the y direction) then ".5" and enter and your plane should be in the top right quadrant.
Now, because the plastic sheets we use to build the Sea Hawk skin come in dimensions of 36 inches by 24 inches, we need to convert inches to cms and then cut our 1 meter squared sheet accordingly. 36 inches = 91.44 cm and 24 inches = 60.96 cm. We will round this to 92 cm and 61 cm accordingly.
To cut the 1 square meter sheet, go into Edit mode (hit Tab) and use the Loop Cut and Slide Tool under Mesh Tools (usually on the left side of the screen). Click on the top part of the square and move the purple line that appears along the x axis to the right until it shows 0.84. That should be 92 cm because the entire square has 100 units on the left side and 100 on the right side (each tiny square being half a cm) so you want 184 tiny squares to equal 92 cm.
Similarly, to cut the 1 square meter piece to 61 cm in the y direction, use the Loop Cut and Slide Tool and, clicking on the left edge of the square, move the line down from zero (the middle) to .22. This equals 122 little squares which repesents 61 cm. It should look like this:
Now select the extraneous faces using the edge and face select vertices toggles and delete them leaving the plane looking like the sheet of plastic we use for our Sea Hawk skin. Save the file under "SeaHawkPlasticSheet".
This is the basic sheet we will start with.
We must now cut it again, this time to the size we use for the Sea Hawk skin first layer.
The Sea Hawk dimensions are 30 inches by 20 inches, which translates to 76.2 cm and 50.8 cm respectively. We will round to 76 and 51 centimeters.
Start by moving the template down into the top right quadrant so that its left bottom corner is at the origin.
Use Loop Cut and Slide again, clicking on the top of the rectangle and
move it over to 152 units (corresponding to 76 cm). Then do the same
thing clicking on the left side and move the new edge to 102 units
(corresponding to 51 cm).
Then select the faces you want to cut and remove them:
Once again move this new figure to the origin.
Now rotate the sheet by 90 degrees counter clockwise, align with the bottom left vertex to the origin and save as "SeaHawkSheet1".
Now we need to cut out the square where the Sea Perch fits into the Sea Hawk. We use the loop cut and slide tool to go up 13 inches (33 cm) and in 5 inches (12.7 cm, rounded to 12.5 cm) on either side. With our grid this means 66 units up from the origin and 25 units in from the origin on one side (along x) and 25 units in from the outer right edge on the other side:
Select the face you want to cut out (the bottom center face) and delete it:
Now select the top inner box, hit "w" for subdivide and you should end up with the following sequence of events:
Now select the lower left and top right vertices of the left top inner rectangle and hit "f" for face; this will create the horizontal triangle line. Do the same thing for the lower right and top left vertices fof the right top inner triangle and you should get this:
Sometimes it is difficult to get the faces to form correctly. When this happens it usually indicates that you may have double points or no points in the appropriate place at all. I click on the two end points of each line and click on subdivide and then select the overlapping points I've created, click "Merge" and then "remove duplicates". Then you should have faces such as seen below:
Once you have the correct geometry, select the right triangles on either side of the bow's isosceles triangle and use Mesh>Vertices>Separate>Part.
Once the parts are separated, tab from edit mode to object mode and place the right triangles on separate layers so you can rotate them. In the real world you would use your exacto knife (box cutter) on the lowest setting and simply perforate the plastic so you can fold them down to form the "beak" of the Sea Hawk.
In Edit mode, select all the faces of one piece of the boat the body of the boat for example) and tab into object mode and extrude in the Z axis .004 (this will give you the 4mm that the real plastic sheet has). Do this for each of the other pieces (the the two side right triangles). You will have to select the faces in edit mode, then toggle to object to do the extrusion. when you select them in Object mode, you should go to a side view and hit E for extrusion, then type in the .004 to get your millimeters.
To do the rotation of the front right triangles you will have to go into Edit mode and select the tip vertex of one of the triangles (at the base of the right angle at one of the top corners of the boat) and then go into Object mode and select Object>Transform>Origin to 3D cursor. Now that becomes your pivot point. (When you want to rotate the other triangle you will have to do the same procedure for the other side).
In one of your split windows (assuming you split your windows as I did, which you do by right clicking at the top of the window where it joins the menu bar and selecting "split area") go to the appropriate side view (I hit the 3 key, you might have to hit the 1 key, depending on which side you are working on) so that you have a YZ orthogonal view (if it is in perspective view you can switch through View>Perspec/Orthogonal or hit the 5 key toggle).
You will have to use multiple views to keep adjusting the angles of rotation until you get the right triangles where you want them, but in time you should be able to fold them down as shown in the picture below. In the real world craft it is a lot easier; you just fold them into place. But in Blender, once you have them where you want them, select each right triangle (i.e. the beak of the hawk) and THEN select the surface of the boat and click "ctl P" to parent them. The parent is always the active object which is the last object selected. Now you can move the boat around by the surface sheet, but can still move and adjust the beak parts which are the children.
Your angles will be something like X = -125, Y = -54 and Z = 89 for the port side, and X = -125, Y = 54 and Z = -89 for the starboard side.
Now move the boat to the grid by setting the Z location to 0 and align its left side to the y axis so you can start working on the wings.
This is a good time to save your work!
Now go to File>Append and select your "SeaHawkPlasticSheet" Plane. Align it so that the Sea Hawk model you just made is in the middle.
Move it to its own layer (command M) but make all layers visible.
Deselect everything in object mode and then select just the Plastic sheet plane.
Tab into Edit mode.
Use Loop Cut and Divide again to cut up the plane, but this time you can use your SeaHawk boat as a template, just as you would in the real world (using a sharpee instead of the Loop Cut and Divide tool!).
Select the face that corresponds to the Sea Perch docking hole and hit X and delete the face:
Now comes a slightly tricky part: You go to line mode (the center one of the three cubes on the menu) and select the vetical line running through the nose of the craft and subdivide, then click on the horizontal line in the middle and subdivide that, and do this for both sides. Then go into vertex mode (by clicking on the leftmost of the three cubes on the bottom menu after the 3D manipulators and the word "Global") and select the vertex on the square closest to the nose of the craft,and move it up so that it lines up with the triangular side of the craft underneath.
The picture above shows working on the port side of the craft, the starboard has already been done).
You may have to merge some points and remove doubles, but eventually you should be able to toggle into face mode and see something like this and select the faces you want to remove.
Now we can work on the wings. You want to measure up each of the wing edges 5 and 5/8 inches (5.625 inches) which is 14.3 cm for the top edge of the wing, and 3 and 3/8 inches (3.375 inches) which is 8.6 cm for the bottom edge of the wing. In the real world you then draw lines from these points to the points at the base of the isosceles triangle that forms the nose of the craft and cut along those lines. In Blender we will make the top edge 14.5 cm (29 units in Blender) and 8.5 cm for the bottom edge (17 units in our setup in Blender) and simply select the vertices of the squares and drag them into position.
(To mark those locations you could use the grease pencil (see http://wiki.blender.org/index.php/Doc:2.6/Manual/3D_interaction/Sketching/Drawing). You turn it on in the Tool Shelf (View>Toolshelf or hit T) and click New Layer and select a color. To use it, hold the D key down and the left mouse button. The problem with the grease pencil is that if you move your image in the layer beneath, you mark you made doesn't do with it, so choose the size you are going to work in and stick with it. I ultimately decided not to bother using it, but leave this in here for the adventurous who want another technique at their disposal.)
Now we want to extrude this sheet 4mm in Z so it has some dimension, and place it on top of the hull we made earlier.
Hit A to select all and hit 1 to go to the front ortho view.
Then hit E and type in .004 and hit return. Tab into Object mode and move the new wing surface into position and then make it the parent of the hull surface beneath (select the hull surface THEN shift right click the wing surface, then hit ctl P. If you make a mistake in the order and need to unparent, select the objects and hit Alt-P an clear).
Voila, you now have the Sea Hawk Skin completed! You can now add color and texture as you see fit (school colors perhaps?)
Now as for building the Sea Hawk in the real world, here are some photos:
1. Start with the standard 4mm plastic sheet, 24 x 36 inches. Mark it at 20 x 30.
2. In the 20 x 30 inch section, draw a line parallel to the 20 inch side that is 13 inches in from what will be the stern of the boat, along the 30 inch long side. Draw two lines parallel to the 30 inch long side, measuring 5 inches in from each side. Mark a point midway at what will be the bow of the sheet (half way down the 20 inch side) and create an isosceles triangle by drawing down to the edges of the line you drew 13 inches in. You can also make another internal isosceles triangle as shown, but this is optional.
3. Cut away the excess 6 and 4 inches as shown above, using an exacto knife (box cutter).
4. Carefully using the exacto knife, keeping it on the lowest setting, perforate, but do not cut all the way through, the outer edges of the larger isosceles triangle. You can then bend the resulting right triangles that make up the outer flaps of the rectangle, folding them down so that they form the "beak" of the Sea Hawk.
5. Hold the Sea Hawk beak together by punching a hole through the bottom of the beak and tying with a twisty or zip tie.
6. Place the Sea Hawk beak surface upside down on another 36 x 24 inch sheet of 4mm plastic (use another color if it suits you; we try to use school colors!). Place it directly in the middle, by marking it at 18 inches and then measuring 5 inches out from the center, drawing lines and then placing the Hawk's beak surface (the yellow piece) so it lines up. On the wing surface (the black piece of plastic) draw lines around the entire Sea Hawk beak surface (like the police do with chalk lines around a dead body at the scene of a crime!).
7. Now take the Beak surface off leaving the wing surface sheet on your table.
You can now measure a top angle of 15 degrees off the line you drew representing the edge of the isosceles triangle with a compass to draw out the top part of the Sea Hawk's wing...
8. And a bottom angle of 25 degrees for the bottom part of the Sea Hawk's wing... or you can experiment with any angles you want (as you can see below, I tried several, but found the 15 degree/25 degree combo aesthetically sexiest!).
9. Or, alternatively, you can simply make a mark 3 3/8 inch from the bottom and another 5 5/8 inch off the bottom and connect the lines to as shown in the picture below. That way you don't need a compass (we used to all carry them in our school kit with pencils and crayons in elementary school, but try finding one in a high school today...!).
10. Cut the wing sheet out, place it on top of the beak surface as shown, and punch holes in it and the beak surface beneath it; tie them together with Zip ties. Why zip ties?
Because this is the same material we used in the Sea Perch to tie things together and the Sea Hawk evolved from the Sea Perch. Evolution is conservative. It tends to recycle old parts and materials. So in biomimicry terms, the Sea Hawk uses a mutated version of the Sea Perch DNA to create creature that can climb out of the ocean...
11. Now you have the Sea Hawk "skin" that will go on the Sea Hawk endoskeleton (which also "evolved" from the Sea Perch PVC endoskeleton!).
WASHINGTON PREPARATORY HIGH SCHOOL ROBOTICS CLUB:
In the photo above, Sea Hawk design engineer Brent Spencer of Motion Picture Marine shows Luis Camacho and EZ Money Harper how the skin will go on the PVC endoskeleton at Washington Preparatory High School (the pvc parts for two endoskeletons are laid out on the table in front of them).
Then EZ starts cutting, showing how... EZ it is to make one....
EZ and Luis lay out the PVC materials needed for two Sea Hawk's (each Sea Hawk needs 7 two foot sections of 1/2" PVC and the parts shown to their right)...
... and then they assemble one of the Sea Hawk frames...
... and then EZ mounts the skin on the endo-skeleton and places the Sea Perch in its "docking bay"
Later that afternoon, New York based environmental technology consultant Kendall Christiansen from Insinkerator (the company that makes what you call "garbage disposals" and which we call "biofuel feedstock preparation devices) visits the school to see about our renewable energy initiative there and easy shows him the Sea Perch "sitting in the dock of the bay" and they discuss ways of powering oceanic human driven water craft and robo-boats using kitchen waste... noting that every navy ship and aircraft carrier has a huge amount of canteen waste they must deal with at sea -- a unique source of energy to generate electricity if ground up and fermented rather than dumped at sea!
Meanwhile, back at the shop, Motion Picture Marine's David Grober explores inexpensive plastic boxes that can be used to house the Arduino microcontrollers and motor shields that we will add to the craft...
The aesthetics aren't great yet... but we figure it has to be something cheap and available to stay in range of school budgets... the aesthetics will come!
VENICE HIGH SCHOOL ROBOTICS CLUB:
Meanwhile, over at Venice High School Robotics Club, Dana Wieland creates her team's Sea Hawk in the Venice school colors, blue and yellow!
Now the Venice Sea Hawk is ready for its endoskeleton and then... on to motors and sensors!
WASHINGTON MATH SCIENCE TECHNOLOGY PUBLIC CHARTER SCHOOL (WMST) IN DC:
Above, the WMST team celebrating a dog and pony build out of the Sea Hawk/Sea Perch combo.
An early version of the Sea Sparrow (with clipped wings and single
water bottle floats and a docked Sea Perch), with a Quadcopter that Evan
Epic Polk successfully landed on the bow.
This Sea Hawk (Sea Sparrow?) has no motors of its own and actually uses the docked Sea Perch as its source of propulsion. We use it as a mobile landing platform for ROV helicopters and quadracopters, an idea the ROTC students came up with to make their robots like the marines, capable of providing security for "land, sky and sea."
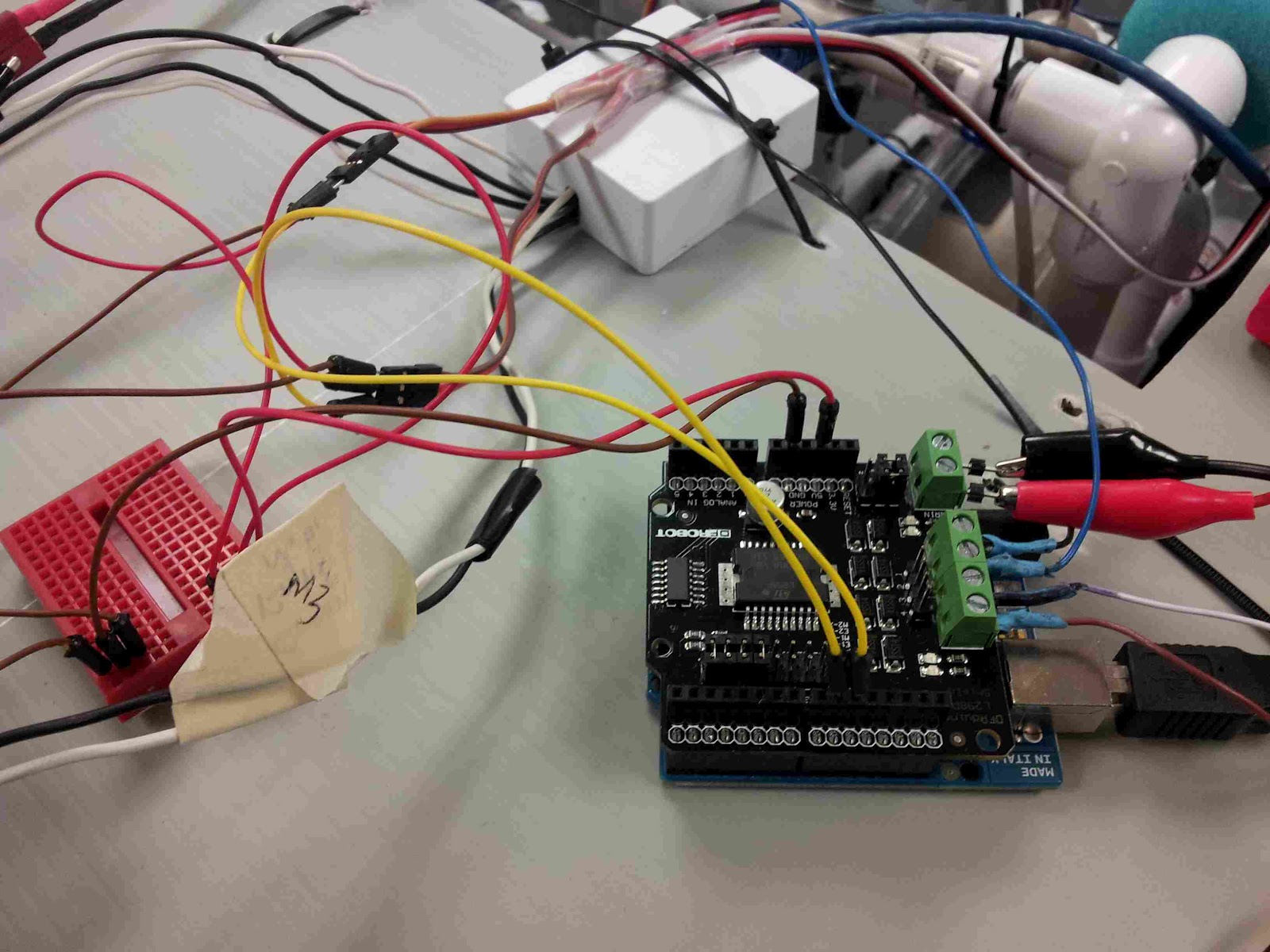
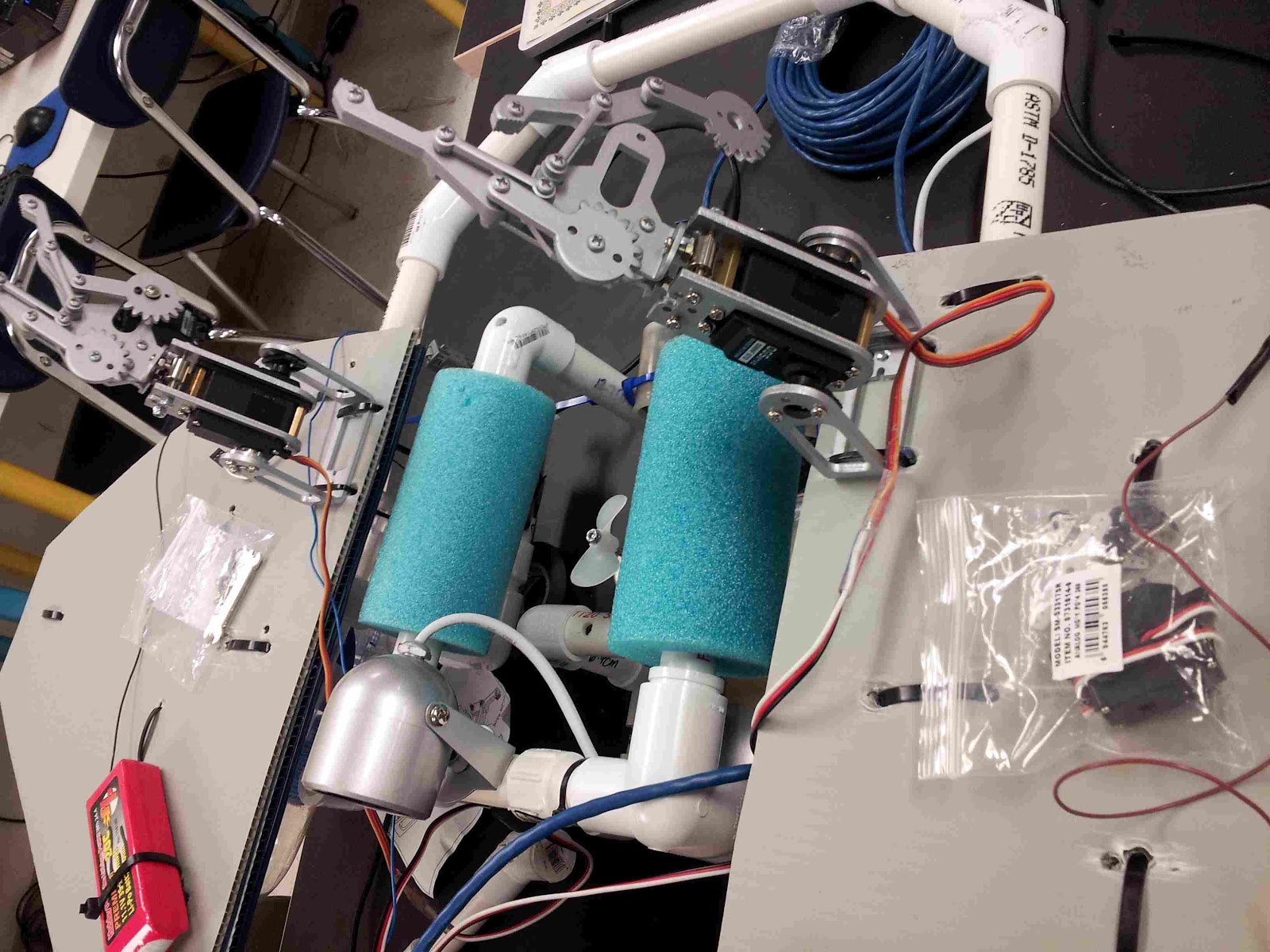
The Sea Hawk/Sea Perch deck, all decked out with true functionality (but no waterproofing!). Here you can see the red 11.1 V LiPo batteries that power the Motor Shields (one for the Adafruit 4 motor shield that powers the 3 Sea Perch motors (each drawing .6 amp continuous and 1.2 amp peak) , and one for the DFRobot 2 Amp motor shield that powers the Sea Hawk motors (each drawing 1.2 amp continuous and 2 Amp peak with a 2 Amp fuse). You can also see the two Sparkfun Robotic claws on servos which will hold the Sea Perch in place by its blue floats. You can see the 8 pin telephone junction box that connects the Sea Perch ethernet cable to the Adafruit Motor shield (the left motor in M1, the right motor in M3 and the up/down motor in M2). And you can see the Arduino boards with their motor shields (the blue in front is the Adafruit controlling the Sea Perch and controlling the two robotic claws via servos connected to the red mini-breadboard shown, the green on the bottom is the arduino/DFRobot motorshield sandwhich controlling the Sea Hawk motors. At the bow of the boat you can see a breadboard with an Ultrasonic Ping sensor and a PIR sensor for some autonomy, connected to the Arduino board under the DF Robot Motor Shield so that the Sea Hawk can autonomously avoid walls and objects. Not shown are the two 9.6 volt batteries needed, one to power each Arduino).
Here are the PIR sensor and Ultrasonic ping Sensor and a PAL Color sensor at the Stern of the boat, above the Sea Hawk beak.
Here the PIR Motion Sensor, PING ultrasonic sensor and PAL color sensor being tested with the Sea Perch motors via the Adafruit Shield/Arduino Uno combo (normally we would use them with the Sea Hawk but we wanted to try them out with the Sea Perch)
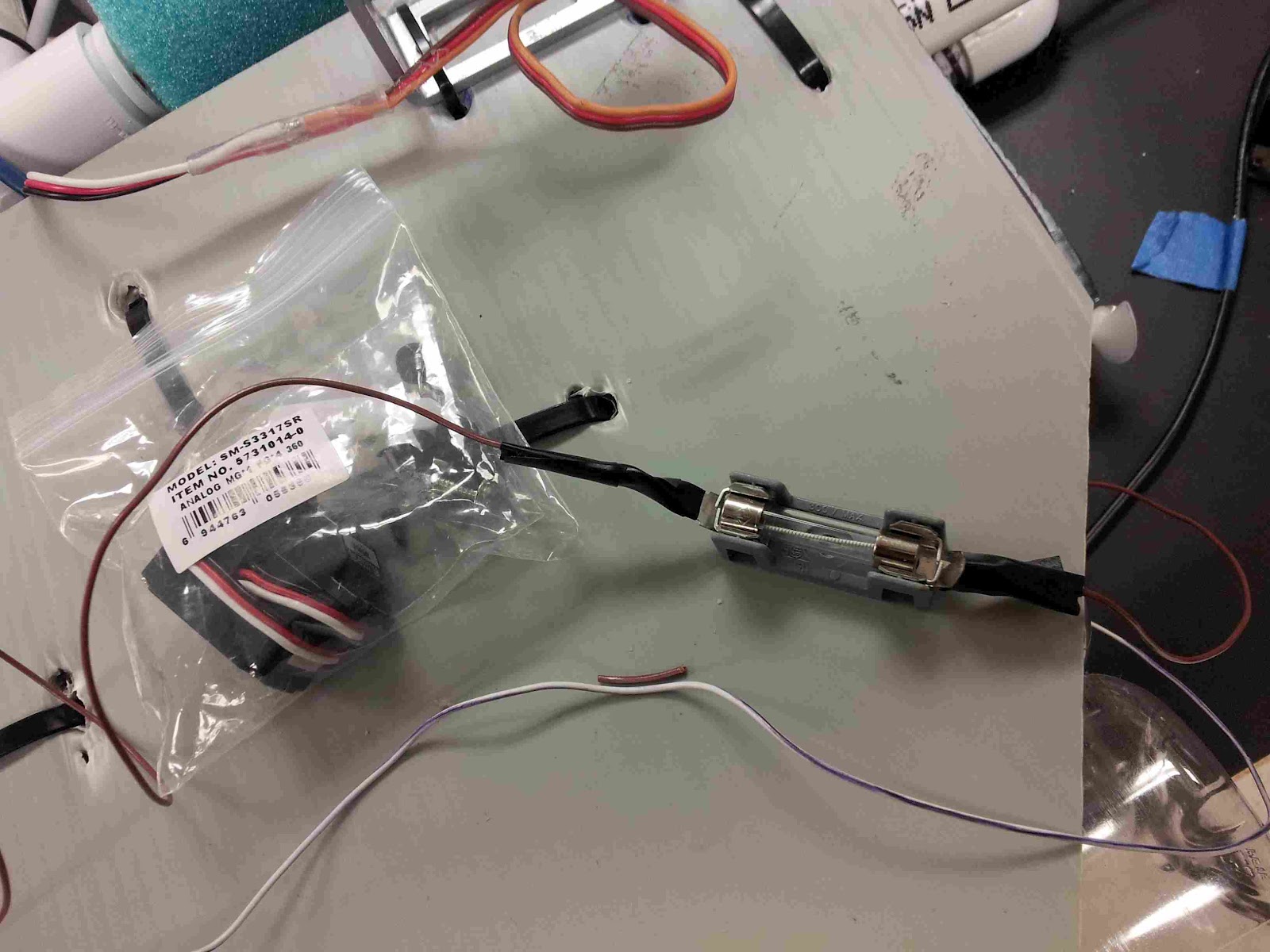
Here is a makeshift fused on-off switch with indicator light connecting the 11.1 Volt LiPo battery (red) to the Motor Shield.
This is the DFRobot 2A motor controller, running off of a red 11.1 V LiPo battery to control the Sea Hawk. The red mini-breadboard is used to connect the sensors and the servos, serving as an easy to to experiment with interface for plugging in different configurations.
Another view of the 2A DFRobot Motor Shield on top of the Arduino that, together, control the Sea Hawk motors. Note that the Arduino must be powered separately from a 9.6 Volt NiMH or LiPo or NiCad hobby battery supply (don't use a typical 9 volt battery as they don't last long enough to do any robotics work and you will be hauling your boat in long before the competition is over to replace the battery -- use a hobby battery with enough amperage to last an hour!) The 9.6 v source for the Arduino is not shown here but you can see the 11.1 V battery that powers the Motor Shield -- it is crucial to have a SEPARATE battery source for the motors and for the Arduino! Watch your jumper settings to make sure you connect things correctly.
The Sea Perch here has an IR/RGB video camera mounted on its bow for real-time underwater videography; with this, when the students pilot the Sea Perch using signals sent from their computer keyboard (using the Arduino Serial monitor) via Xbee Explorer to the Xbee Receiver which will be mounted on the Arduino/Adafruit sandwhich, they won't have to "'peer into the pool' to pilot their Perch", they will pilot it remotely wherever it is deployed.
Here you can see an otter box (clear plastic case) with the MIT Sea Perch Sensor suite mounted inside and placed on the mat of the Sea Perch. The MIT Sea Perch Sensor Suite enables the Sea Perch to gather data on temperature, salinity, depth (pressure) and turbidity (light) and stores it with a clock stamp on an SD card to be uploaded upon retrieval to Google Digital Ocean.
The Sea Hawk enables the Sea Perch to leave the shore. The Sea Perch is now tethered to the white
junction box on the boat (center of picture) which connects to the Arduino-MotorShield-Xbee
sandwhich. The Sea Hawk boat, using its servo controlled robotic claws,
can take the Sea Perch anywhere!
Mr. Nouristani put 2 Amp uses between the positive wire of each motor and the DFRobot motor shield because experiments with the ammeter showed that if the 1.2 Amp motors get stuck (for example in Sea Weed) they can draw up to 5 amps, which would burn out the chips.
WMST Robotics Club instructor Mohammed Nouristani engages in a deep thought experiment to figure out how we are going to water-proof all these messy electronics!
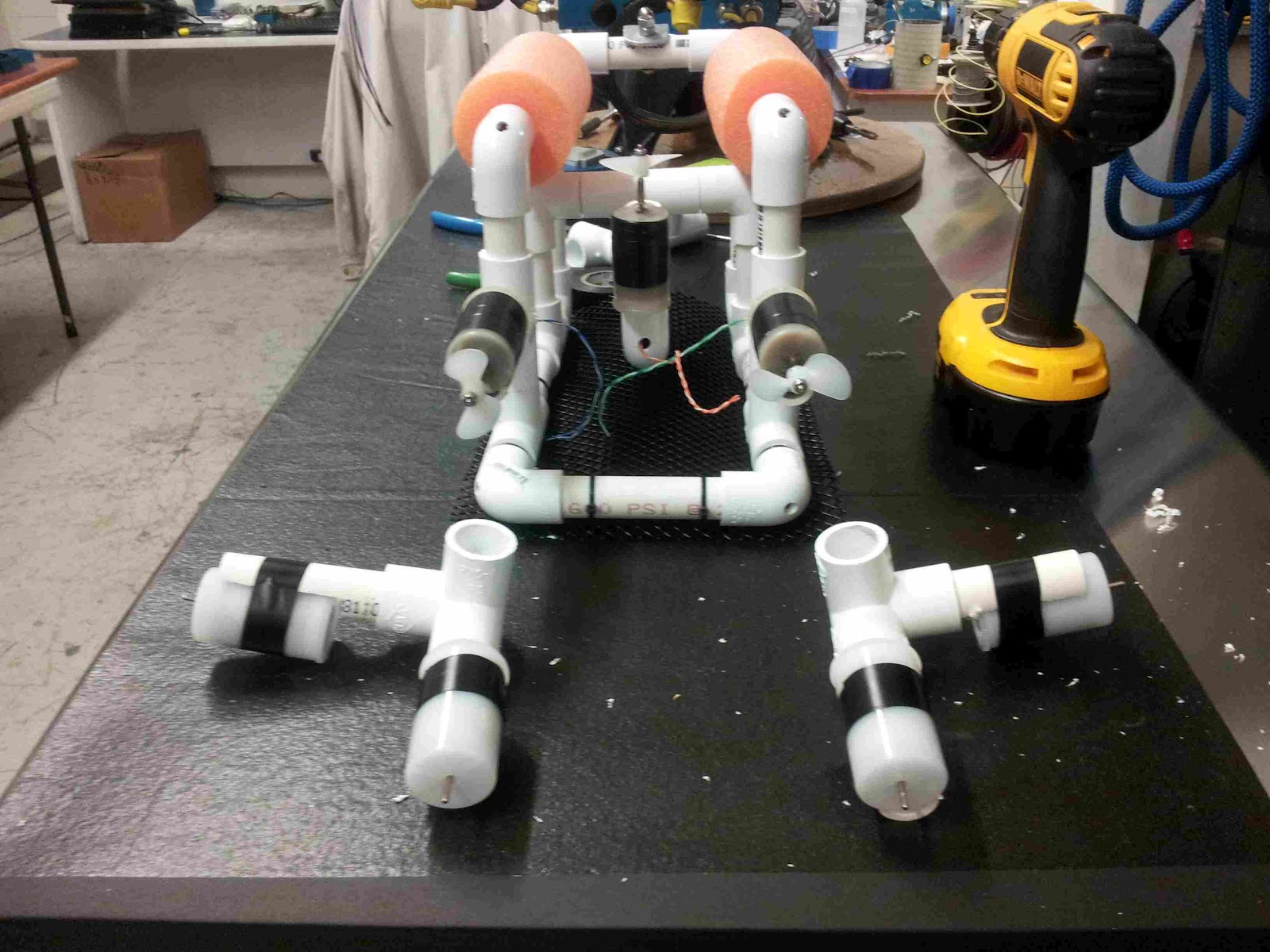
The Sea Hawk flotation is achieved by a cluster of six 1 liter water bottles in the beak of the craft and two 3 bottle clusters of 1.5 liter water bottles under each wing of the craft. In this way the Sea Hawk takes the plastic water bottle trash problem "under its wing" and PORPOISE helps re-purpose the oceanic trash into useful items for environmental sensing. In this picture you can also see the motors mounted on the Sea Hawk, and note that they appear identical to the Sea Perch motors except for the way they are mounted (we don't use zip ties anymore, we use T's). The only difference between the Sea Hawk and Sea Perch motors from a functional standpoint is that the Sea Hawk motors are twice as powerful (1.2 Amps continuous versus 0.6 amps). As such they need more powerful motor controllers and fuses.
The next big challenge, besides getting the autonomy working with the sensors and getting the robotic claws working, is to get everything water proofed!
In the video above, Culhane explains the Sea Perch/Sea Hawk concept at WMST.
In the video above EZ Money and Juhayra explain the Sea Perch/Sea Hawk concept at Washington Prep.
In the video above Culhane explains the concept to EZ and Juhayra at Washington Prep; this video shows both the 11.1 V motors controlling the motors and the 9.6 Volt motors controlling the Arduinos.














































.png)