

Imagine the Mission Impossible Theme playing in the background...
(if your imagination is failing you today, you can always click here...)
Your mission, should you choose to accept it, is to design a robotic surface craft that can deploy and recover your Sea Perch. Using the minimum amount of materials. At the lowest cost.
To get you started we at Motion Picture Marine (a Hollywood company specializing not only in Land and Sea Camera Stabilization through our Perfect Horizon Robotic Sensor Platform, but Marine coordination for film and television) invite you to consider some of the options we've worked with in the real world for bringing camera subs on location in the ocean and bringing them back to shore safely with their valuable payload of motion picture footage.
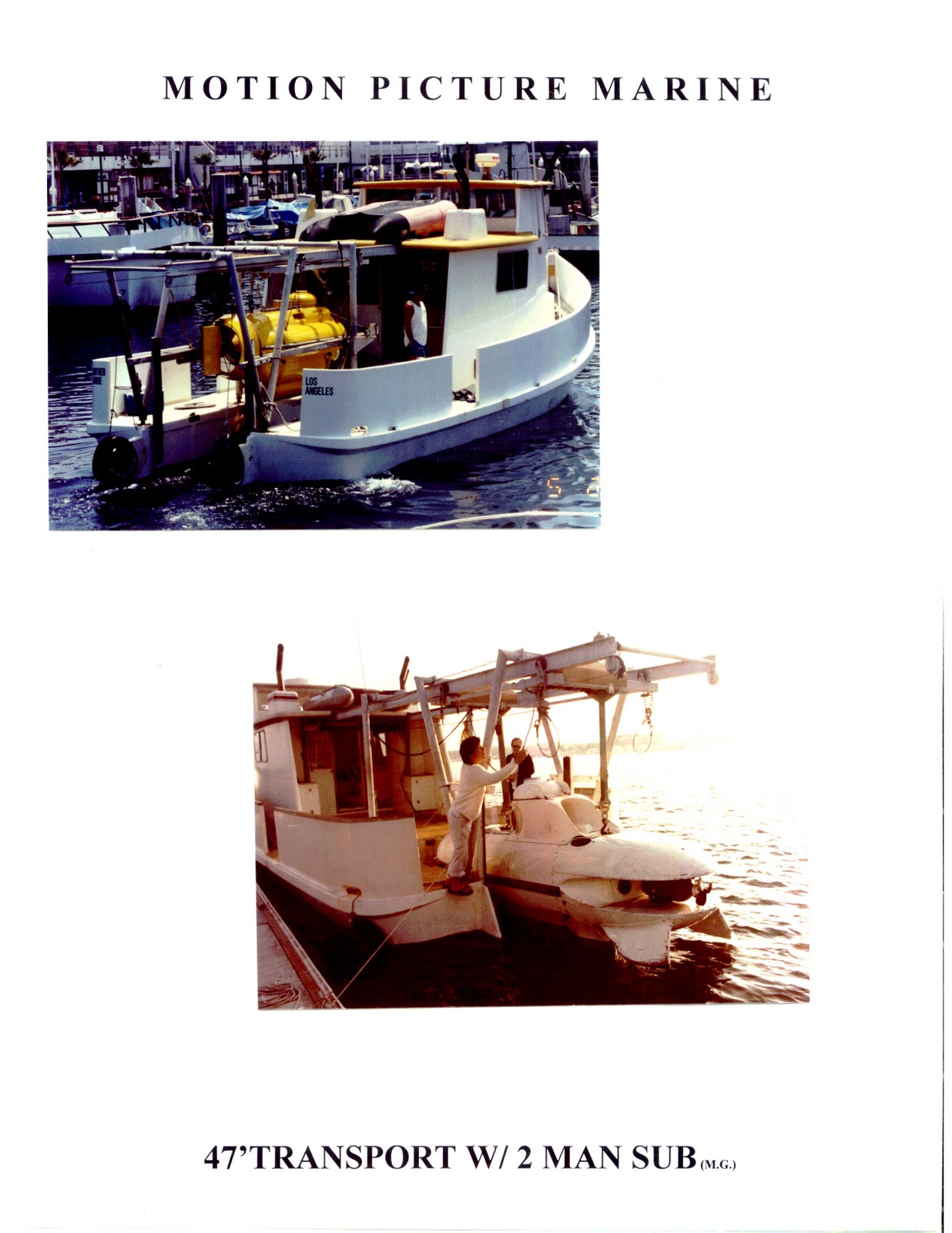
One you might draw inspiration from is this "Mother Goose" 47 foot Transport with 2 man sub. In the photos below, note the slot in the hull of the transport that the sub can slide into.

Now imagine that the real life two man sub depicted in these photos is your Sea Perch. How would you construct a boat that would accommodate your ROV? Would you be able to winch it up onto the boat? Is it feasible to lift it out of the water? Could you pilot it into a slot in the boat's hull? How would you secure it once you drove it in?
Or you might draw inspiration from this "Wave Adapted Modular Vessel" (WAM-V) surface craft from Marine Advanced Research:


One suggestion our students came up with was to allow the Sea Perch to be a "driver module" for the boat itself. Since it has thrusters, the idea was that the Sea Perch, when it is nested inside the boat hull, could be used to drive the boat. Then when it is deployed underwater, tethered to the boat above it, it would gently drag the boat as it moved, akin to the way "SNUBA-Divers" tow their surface tank craft from beneath.



Imagine that the SNUBA divers depicted above were the Sea Perch and the dingy that their scuba tank is in was your surface craft. With this concept, the Sea Perch provides all of the motive power. Underwater the Sea Perch explores the undersea environment and tows its surface support craft via the Cat-5 Ethernet cable going from the motor control box to the Sea Perch propeller motors. The motor control box, which you hacked to work with an Arduino microcontroller and motor shield, rests safely topside where it can receive programming signals wirelessly via X-bee or Bluetooth. When the mission is over the Sea Perch is piloted up to the surface craft with which it docks. Then Sea Perch uses its motors to push the surface craft back to shore for its data collecting SD card to be removed.
This is the least expensive option, requiring just one arduino and motor shield for both the Sea Perch and the surface craft.
No comments:
Post a Comment